ESK8 controller Konfiguration
Status: Okt 2016, ESC V4.10/11/12, BLDC Tool V2.18, Firmware V2.18
For an English version please have a look here: Benjamin Vedders VESC Youtube Tutorial
Diese Anleitung wird nicht alle Spezialfälle abdecken können und soll nur eine einfache Einführung ins BLDC Tool und die Konfiguration des ESC geben. Also die Basics eben.
Ein wichtiger Hinweis: das BLDC lässt auch Änderungen zu, die den ESC irreparabel beschädigen können. Es ist also unabdingbar genau zu wissen was man tut, wenn andere Parameter geändert werden als hier dargestellt!
Für Defekte an den ESCs, die durch fehlerhafte Eintragungen im BLDC Tool oder falsch installierte Firmware (s.u.) verursacht werden, ist eine Reparatur im Rahmen der Gewährleistung nicht möglich. Auch Kurzschlüsse zerstören den ESC, daher unbedingt vorher alles isolieren mit Schrumpfschlauch oder ähnlichem.
Wir raten momentan vom Betrieb des ESCs unter FOC ausdrücklich ab, da sich diese Technologie noch in der Entwicklung befindet!
Ich werde die einzelnen Schritte sukzessive mit Fotos ergänzen. Die ursprüngliche Version des BLDC Tools wurde unter Ubuntu erstellt, die Anleitung dazu ist auf vedder.se zu finden.
Voraussetzungen:
- BLDC Tool hier runterladen (und falls notwendig auch die entsprechende Firmware, falls diese upgedated werden soll)
- USB Kabel (darf nicht zu lang sein, ich verwende eines mit Shield) mit Mini USB Anschluss
- Fertig montierter ESC mit Kondensator(en) [Elko] möglichst nahe an der Platine, gut isoliert mit Schrumpfschlauch oder ähnlichem!
- ESC muß mit einer Stromquelle verbunden werden (entweder am Akku oder an externer Stromquelle mit min 16V/5A), bevor mit dem BLDC Tool gearbeitet werden kann
- Beim Verbinden des ESC mit dem Akku darauf achten, dass möglichst Minus zuerst angeschlossen wird (wenn ein Powerswitch eingebaut ist, ist das unproblematisch) und dass die Kabel zwischen ESC Elko-Board und Akku nicht länger als 20cm sind!
- Motor mit dem ESC verbinden
- Bei auftretenden Schwierigkeiten bitte erst das Kapitel "Mögliche Fehlerquellen" lesen
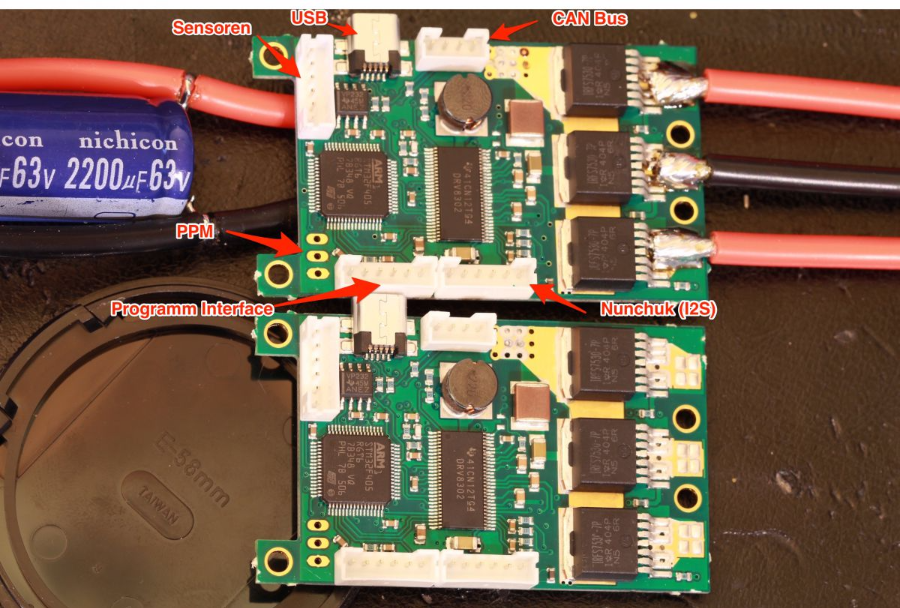
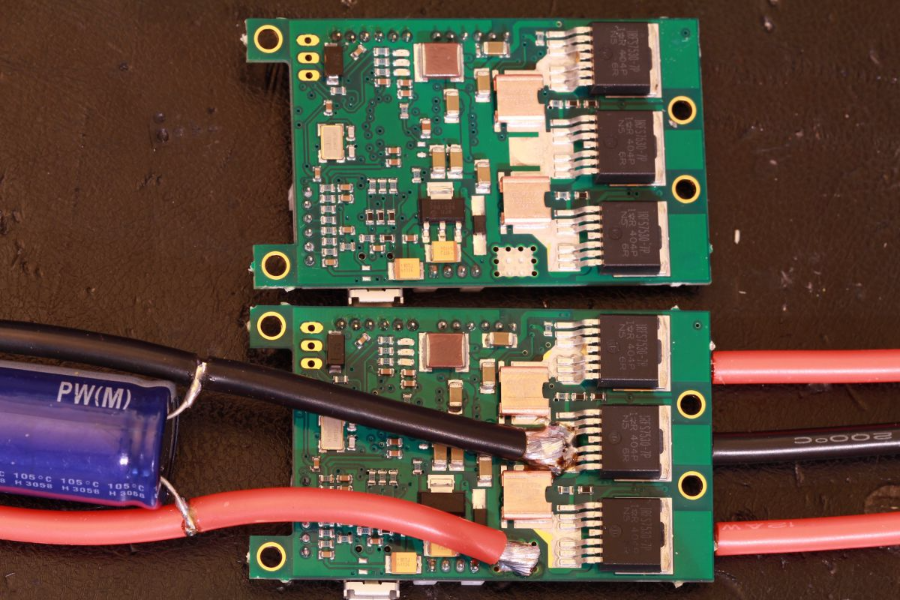
Übersicht des ESC V4.7, vorn und hinten, die Anschlüsse bei V4.10/11/12 unterscheiden sich nur minimal (I2S) und die Vorgehensweise ist die gleiche.
Schritt 1:
- Stromversorgung zum ESC einschalten und erst dann diesen mit dem Computer verbinden. BLDC Tool starten, refresh USB Port (1) und „connect“ (2) anklicken. Unten sollte eine grüne Meldung „connected“ erscheinen. Danach "read configuration" (3) anklicken (wichtig!). -> in der Fussleiste steht danach „connected“
- Anmerkung: Erscheint die Meldung, daß der ESC erst mal ein Firmware Update braucht, dieses auf dem Tab „Firmware“ ausführen. Dazu muss im BLDC Tool Verzeichnis auf dem Computer die passende FW ausgesucht werden ("choose"), da dies abhängig von der HW Version des ESCs ist. D.h. das hier runtergeladene Archiv enthält auch das Verzeichnis mit der HW-Version 4.10/11/12, dort muss die Datei "HW_410_411_412/ESC_default.bin“ gewählt und dann „upload“ geklickt werden. Danach rebootet der ESC und muss im BLDC Tool neu connected werden.
- WICHTIG: unbedingt die richtige Firmware wählen, da sonst der ESC zerstört wird, d.h. immer aus dem Verzeichnis HW_410_411_412!

Schritt 2:
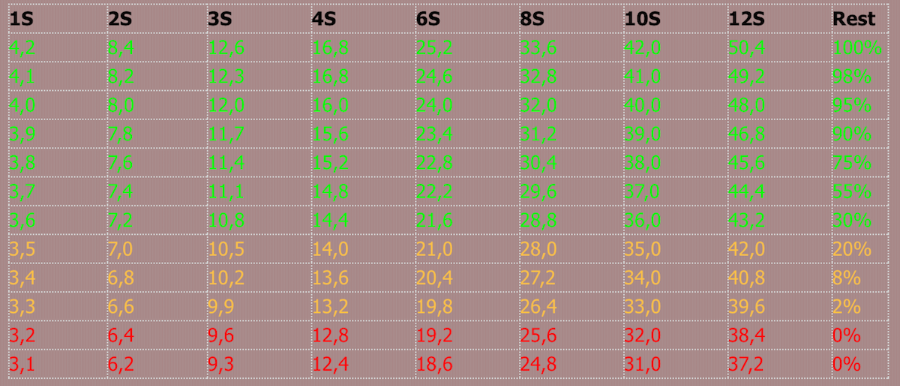
- Optional: Um den Akku mit dem ESC vor Tiefenentladung zu schützen, sollten im BLDC Tool die Werte "Battery cutoff start" und "Battery cutoff end" angepasst werden. Diese Werte befinden sich ebenfalls im
Tab "Motor Configuration/Motor" unter "Other Limitis" im unteren rechten Fenster. (s. Screenshot oben).
- Berechnung:
- "Battery Cut-off Start" = Anzahl der Zellen x 3,5V (z.B. bei 10s x 3,5V = 35), diese Zahl dort eintragen
- "Battery cutoff end" = Anzahl der Zellen x 3,2V (z.B. bei 10s x 3,2V = 32), diese Zahl dort eintragen
ACHTUNG: Wenn die Werte für "min. Input Voltage" oder "Battery cuttoff Start/End" falsch eingestellt werden, funktioniert der ESC nicht! Dann bitte mit "read default configuration" die alten Werte wieder herstellen und mit der Installation (inkl. Motordetection) von vorn beginnen!
- Seitlichen Tab „Sensor(less)“ anwählen und auf „Start detection“ (2) klicken. Der Motor sollte jetzt kurz hochdrehen und danach nochmal kurz langsam laufen. Dauert insgesamt 3-6 Sekunden. Die im rechten Fenster gefundenen Werte werden mit dem "Apply" Button (3) übertragen
- Nun muss "Wirte configuration" (4) angeklickt werden.
- Sollten keine Werte detektiert werden, liegt ein Fehler vor (s.Kapitel mögliche Fehlerquellen)

Schritt 3:
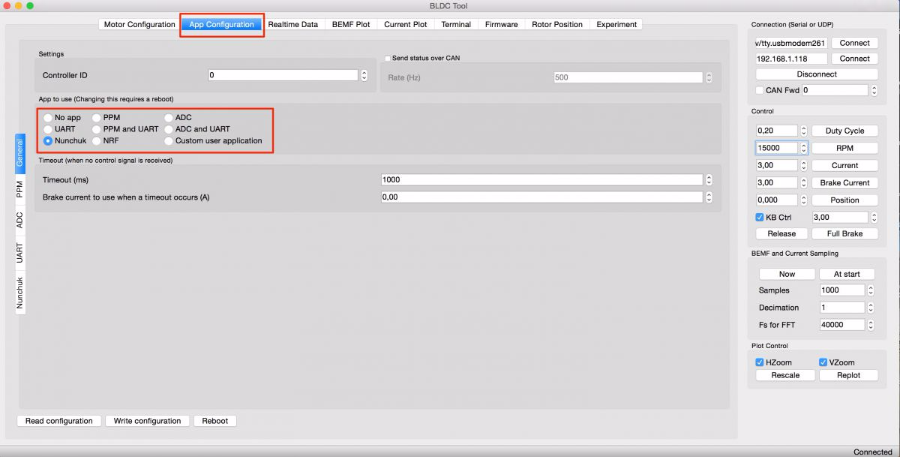
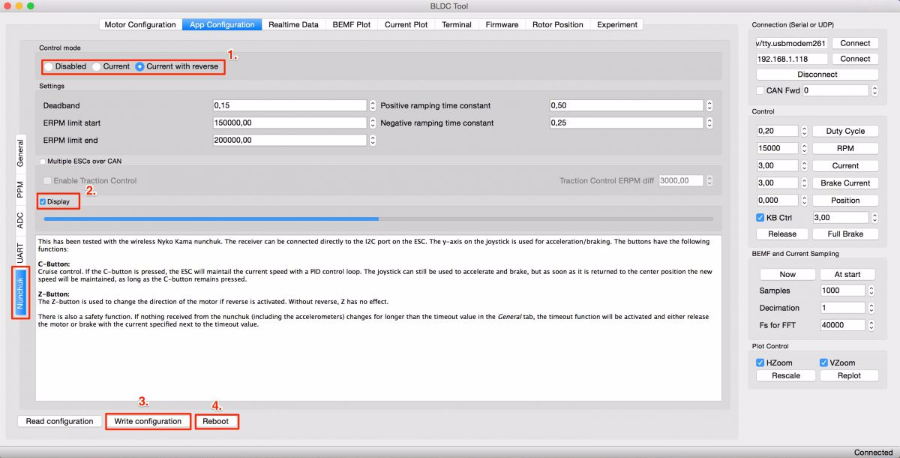
- Tab „App configuration“ wählen und „read configuration“ anklicken. Dann die entsprechende App wählen, Beispielsweise „Nunchuk“. Den seitlichen Tab „Nunchuk“ auswählen und dort entweder „Current“ oder „Current with reverse“ (je nach dem ob Rückwärtsfahren gewünscht wird) auswählen. „Display“ anklicken, jetzt sollten die Steuerbefehle des Nunchuk sichtbar werden.
- Danach auf „write configuration“ klicken und dann auf „Reboot“ (wichtig!).
- Die gleichen Schritte gelten auch für die anderen Arten von Fernbedienungen (z.B. PPM für die GT2B etc.).
- Danach die Funktion der Fernbedienung testen (Fehlerbehebungen siehe unten)
Dual Motor Configuration:
- CAN Bus verbinden
- Zuerst SLAVE ESC konfigurieren wie oben,
- In der App. Configuration. dem SLAVE ESC die Controller ID „1“ zuordnen und „Send Status over CAN“,
- danach „write configuration“ und „reboot“ -> es muß keine App konfiguriert werden beim SLAVE, das geschieht dann beim MASTER
- MASTER ESC konfigurieren wie oben, aber in der App. Config. dem MASTER ESC die Controller ID „0“ zuordnen und die richtige App konfigurieren (wie Schritt 3), aber zusätzlich „Multiple ESCs over CAN“ selektieren und wenn gewünscht „Traction Controll“. Danach „write configuration“ und „reboot“.
Mögliche Fehlerquellen:
- ESC wird vom BLDC Tool nicht erkannt („not connected“) -> USB Kabel wechseln, Powerversorgung prüfen (min. 16V empfohlen), USB Ports am Rechner prüfen, kein USB Hub verwenden, BLDC Tool neu installieren, an einem anderen Rechner testen
- Motor Detection“ funktioniert nicht:
- -> Kabel zu Motor prüfen,
- alle (!) Lötstellen prüfen (sicht- und mechanische Prüfung),
- ggfls. Motorkabel umstecken,
- Werte "Current" und "min. ERPM" unter dem Detect-Button senken,
- „min. input Voltage", „max. input Voltage“ und alle andren Input-Werte im Motor Tab prüfen,
- alle Werte auf Werkseinstellung zurück setzen (mit "read default configuration") und von vorn beginnen!
- Fehler im Terminalfenster mit dem Befehl "fault" oder "faults" auslesen, bei DRV Errors muss der DRV Chip ersetzt werden (s. letzter Punkt)
- Fernsteuerung funktioniert nicht:
- app config wiederholen und „write configuration“ und und vor allem „reboot“ klicken nicht vergessen,
- Verbindung zum Fernbedienungs-Receiver überprüfen (wenn dieser heiß wird: das PPM-Kabel anders rum einstecken!)
- Fernsteuerungsverhalten ist unter PPM nicht optimal: die Werte können angepasst werden, s. hier -> https://youtu.be/OtuofrQr3F8
- Fernsteuerung verliert Verbidung: Kabel zum Receiver überprüfen, mit Heisskleber neu fixieren, Receiver an einem anderen Ort im Gehäuse platzieren (z.B. können Gehäuse aus Carbon das Signal abschirmen!), Akku/Batterie am Transmitter prüfen
- Motor reagiert nicht oder nur unzureichend: Motorkabel kontrollieren -> Lötstellen, Stecker, Kurzschluss durch Scheuern der Kabel am Motorausgang, Phasenkabel umstecken
- Motoren mit mehr wie 200KV /10S zu verwenden werden nicht empfohlen
- mit weniger S wird empfohlen auch die KV zu senken.
- ESC lässt sich unter 30V nicht ansteuern: ELKOs prüfen (Verbindung hat sich gelockert, kalte Lötstelle am ELKO Board) -> neu verlöten!
- Falls nichts hilft und ein Kurzschluss den ESC beschädigt hat, gibt es hier einen externen und unabhängigen Re
Sonderfälle:
- Bei Motoren mit Sensoren werden mit "Motor Detection" (Schritt 2) gefundenen Werte im entsprechenden Feld durch klicken von „Apply“ eingetragen und der Sensor Mode manuell auf "sendsored" oder "hybrid" umgeschaltet. Bei mir ergab "hybrid" das beste Resultat.
- Für Radnaben Motoren müssen die Werte im „Sensorless“-Tab Min ERPM und Min ERPM Int Lim. angepaßt werden, in meinem Fall auf 50 und 600
- Falls das Anfahren aus dem Stand Schwierigkeiten macht: im „Tab“ Advanced“ den Wert „Startup Boost“ erhöhen (Achtung: nicht über 0.030 gehen!)
- Akkuwerte und Motorenwerte: die Werte für „Motor max“ (A) und „Battery max“ (A) können im Tab „Motor“ den Gegebenheiten angepaßt werden. D.h. der ESC kann 60A, der Akku allerdings nur 40A liefert, dann kann man diese Werte entsprechend anpassen. Vorteil: der ESC erkennt die Stromentnahme und optimiert diese!
- Optimal sind die Einstellungen bei Motor max, Motor min und Batt max gleichmäßig ein zu stellen, z.B Motor max 40A, Motor min -40A und Batt max 40A
- Die Werte bei Batt min (regen) sind die Werte abhängig wie stark die Bremswirkung sein soll.
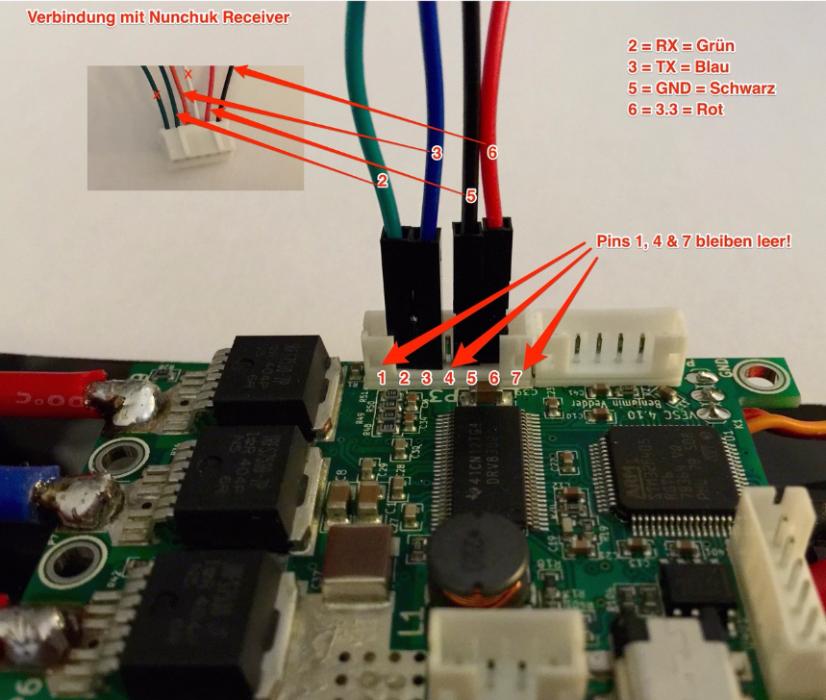
Kama Nunchuk Receiver mit dem ESC verbinden (Version 4.10/11/12!):
1. Kama Nunchuk Receiver auspacken, Plastik und Stecker vorsichtig entfernen, die Kabel dabei nicht beschädigen.
2. Kabel des Receivers verlängern. Am einfachsten werden die Kabel mit einem JST-PH 2mm 7 Pin Stecker (V4.10) verbunden. 6 Pin Stecker gehen aber auch. Pinbelegung am VESC, die Farben entsprechen den Farben des Nunchuk Receivers (d.h. bitte die richtigen Farben mit dem 6Poligen Stecker verbinden!):
ESC Hardware Version V4.10 (inkl. Farb-Zuordnung vom Nunchuk Receiver zu unseren JST-PH 6Poligen Steckern):
- Pin 1 = LEER = 1. grünes Kabel am Stecker (kann abgeschnitten werden)
- Pin 2 = Grün = CLK = 2. Grünes Kabel am Stecker mit dem grünen Kabel vom Nunchuk Receiver verbinden
- Pin 3 = Blau = Data = Oranges Kabel am Stecker mit dem blauen Kabel vom Nunchuk Receiver verbinden
- Pin 4 = LEER = Weißes Kabel am Stecker (kann abgeschnitten werden)
- Pin 5 = Schwarz = GND = Rotes Kabel am Stecker (!) mit dem schwarzen Kabel vom Nunchuk Receiver verbinden
- Pin 6 = Clock -> Pin 1 = Schwarzes Kabel am Stecker (!) mit dem roten Kabel vom Nunchuk Receiver verbinden
- Pin 7 = LEER
3.Kabel auf dem Kama Nunchuk Receiver mit Heisskleber fixieren und den Receiver mit Schrumpfschlauch verpacken.
Einstellen der maximalen Geschwindigkeit "max. ERPM" (von boesila):
ERPM steht für "Engine Revolutions Per Minute" und der maximale Wert - zu finden im BLDC-Tool unter dem Tab "Motor Configuration" unter "RPM Limits" - beeinflusst die Höchstgeschwindigkeit des Motors.
Aber wie wird ERPM berechnet bzw. was ist das genau? Es ist nicht die Drehzahl des Motors, sondern:
- max. ERPM=(maximale Drehzahl des Motors)*(Polzahl des Motors)*(Maximum Duty Cycle)
Dabei ist die maximale Drehzahl des Motors = kV Wert* Spannung. Das heißt die max. Drehzahl des Motors = ERPM/Polanzahl/(max. duty cycle).
Somit kann man sich seine gewünschte max. Geschwindigkeit des Boards mit dem "max. ERPM"-Wert einstellen, welche sich folglich aus Übersetzung, der Radgröße, max duty cycle und Polanzahl des Motors berechnet ... oder man schaut einfach wie schnell sich der Motor bei max. Geschwindigkeit dreht und wenn man diese z.B um 50% drosseln möchte (z.B. "Kindermodus") dann stellt man 50% des realen max. ERPM (nicht des default Wertes) ein.
Diese Anleitung wird mit den Änderungen und Erweiterungen des BLDC Tools und der ECS HW laufend ergänzt.